中國團隊首度揭開神經編碼機制有助於設計機器人手臂
中國科學院自動化研究所宣佈,研究團隊通過記錄獼猴執行自然抓取任務時的神經活動,首次發現在大腦的運動皮層中存在一種類似全球定位系統(GPS)的神經編碼機制,能夠在抓取過程中實時表徵手在空間中的位置。這一神經科學領域重要研究發現,爲理解大腦如何控制運動提供了全新的視角,併爲腦機接口的設計和機器人運動控制帶來重要啓發。相關成果論文近日在國際學術期刊《自然-通訊》發表。
中新社報導,論文第一作者、中國科學院自動化所博士研究生曹盛浩介紹說,人類以及獼猴等靈長類動物的手臂可以靈巧地執行各種抓取任務。大腦如何規劃和執行這些任務一直是神經科學的核心問題之一。此前的研究表明,大腦海馬體中的「位置細胞」能夠爲身體導航提供空間信息,幫助動物構建認知地圖。然而,對於手等身體部位的運動,是否存在類似的導航框架一直是個未解之謎。
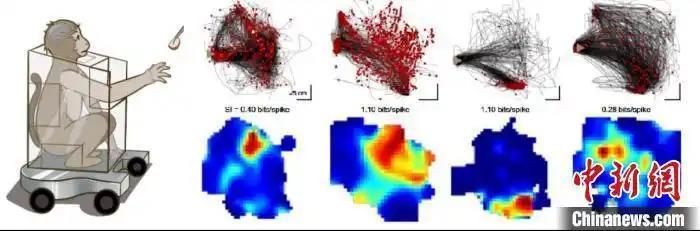
本項研究中,合作團隊通過在4只獼猴的大腦背側前運動皮層(PMd)植入微電極陣列,記錄它們在自然抓取任務中的神經活動,並通過多個攝像頭記錄獼猴手部的運動軌跡,分析PMd神經元在抓取任務中的活動模式。
研究發現,約22%的PMd神經元在手部處於特定空間位置時活動顯著增強,形成了「位置野」。這些神經元能夠實時、高效地表徵運動中的手位置,僅使用50個最活躍的位置神經元(約佔總記錄神經元的10%),就能以80%的準確率解碼手部運動軌跡。該結果表明,手位置信息在PMd中以「位置野」編碼的形式存在,類似於海馬體中用於導航的位置細胞。
進一步研究發現,手位置信息與手的運動方向、速度和抓取目標的位置等信息在同一個PMd神經元羣體中共同編碼。這種混合編碼方式使得大腦能夠同時考慮空間信息和運動信息,從而實現高效的運動規劃和執行。這一混合編碼方式也正是海馬體在空間導航任務中所採用的方式,提示大腦利用相似的神經計算框架實現不同尺度上的空間導航。
研究團隊表示,通過解碼這些位置神經元的活動,未來可能實現更精準高效的神經假肢控制,同時,可以基於大腦的運動導航原理,設計更加靈巧的機械臂控制算法。
中國科學院自動化研究所記錄獼猴執行自然抓取任務時的神經活動,首次發現在大腦的運動皮層中存在一種類似全球定位系統(GPS)的神經編碼機制。(取自中新網)
相關資訊
 首度揭開神經編碼機制 陸研究有助設計機器人手臂
首度揭開神經編碼機制 陸研究有助設計機器人手臂 人類「偏好」怎形成?榮陽團隊揭背後的神經機制
人類「偏好」怎形成?榮陽團隊揭背後的神經機制- ▣ 小米機器人申請運動控制專利,提高機器人手臂末端移動精準度
- ▣ 中國科研團隊發佈第四代量子計算機“神經中樞”
- ▣ 醫療機器人顯身手 助力建設“健康中國”
 無真人服務!臺首間「全自助」旅店 機器手臂放行李
無真人服務!臺首間「全自助」旅店 機器手臂放行李 首臺國產 化療調配機器手臂亮相
首臺國產 化療調配機器手臂亮相 奇美引進首臺國產「智能化療調配機器手臂」 助減少1/3人力
奇美引進首臺國產「智能化療調配機器手臂」 助減少1/3人力- ▣ 節卡機器人股份有限公司取得擬人機械臂及機器人專利,解決現有技術中模擬人手臂精細運動的問題
 KUKA機器手臂 人機協同新觀念
KUKA機器手臂 人機協同新觀念 LINE對話機器人設計大賽開放報名 加碼免費教學
LINE對話機器人設計大賽開放報名 加碼免費教學- ▣ Manus AI合夥人澄清邀請碼機制:服務器容量有限 團隊正全力輸出
- ▣ 揭秘機器人制作過程:從設計到組裝的全流程解析
- ▣ 李飛飛團隊新作:讓機器人更懂家務!(附開源代碼)
 新友貿易機械手臂 製造業利器
新友貿易機械手臂 製造業利器- ▣ 中國軟件國際(00354)攜手深開鴻發佈全國首個基於開源鴻蒙的機器人操作系統 M-Robots OS助力中國機器人產業進入“羣體智能”新時代
- ▣ 中科雲谷申請用於機器人的控制方法等專利,基於控制策略控制機械臂對零件執行操作
 ROSA機器手臂 增加脊椎手術精準度
ROSA機器手臂 增加脊椎手術精準度 首度參加美國DARPA機器人的團隊 交大2021年搶200萬美金
首度參加美國DARPA機器人的團隊 交大2021年搶200萬美金- ▣ SpaceX 機械臂神奇接住“星艦”火箭助推器
- ▣ 《電腦設備》採用達明機械手臂 勤益科大奪機器人智機化佳作
- ▣ 新膝望 機器手臂換膝減痛助復原
- Marsi Bionics外骨骼機器人 導入磁性編碼器
- 換膝手術革命 機器手臂提升精準度
- 拜登團隊 籲設美中衝突降溫機制
- 板橋高中機智慧器人學苑 暑假程式設計營隊
- ▣ 重啓機器人團隊?OpenAI“重燃”機器人野心
- 利茗機械手臂套件 助攻智慧製造
- 反制「中國製造2025」! 美計劃限制中國投資航空、機器人企業